

Product Description
The Power Sense Module (PSM) provides analog current and voltage sensing to your Pixhawk autopilot mounted either on your BlueROV2 or custom marine robotics project. The ArduSub firmware for the Pixhawk supports the Power Sense Module and through QGroundControl will give you visual indications of battery level and current consumption.
This module uses a hall effect current sensor for excellent accuracy at low current draw.
Unlike standard power modules for the Pixhawk, the Power Sense Module will NOT provide 5V power, only sensing abilities. On the BlueROV2, the Pixhawk is powered from multiple sources so this 5V power supply is not needed.
Contents
- 1 x Power Sense Module with pre-installed 5.5mm bullet connectors and spade connectors
- 1 x 200mm DF13 to JST-GH cable
- 1 x 200mm JST-GH to JST-GH cable
Specifications
| Parameter | Value | |
|---|---|---|
| Electrical | ||
| Max Voltage Input | 25.2V (6S) | |
| Max Current Sensing | 100A (non-continuous) | |
| Voltage Sense Output | 11.0 V/V | |
| Current Sense Output | 37.8788 A/V (offset by 0.330 V) | |
| Output Connector | Non-Insulated Spades (S5-3.5SNB) | |
| Input Connector | 5.5mm Bullet Connector | |
| Physical (Board Dimensions) | ||
| Length | 24 mm | 0.94 in |
| Width | 19 mm | 0.75 in |
| Height (without header pins) | 7 mm | 0.28 in |
| Power Pin Out | ||
| Pin | Signal | Volt |
| 1 (red) | NOT CONNECTED | |
| 2 (blk) | NOT CONNECTED | |
| 3 (blk) | CURRENT | +3.3V |
| 4 (blk) | VOLTAGE | +3.3V |
| 5 (blk) | GND | GND |
| 6 (blk) | GND | GND |
Documents
PSM-ELEC-PCB-R2 (PDF)
Revision History
- 13 September 2021 | R3 – Initial release | Updated bullet connectors from 3.5mm to 5.5mm
- 12 December 2018 | Changed XT60 Connector to 3.5mm bullet connectors
- 10 October 2018 | R2 – Initial release
Quick Start
- Follow the PSM installation instructions if installing or retrofitting a BlueROV2.
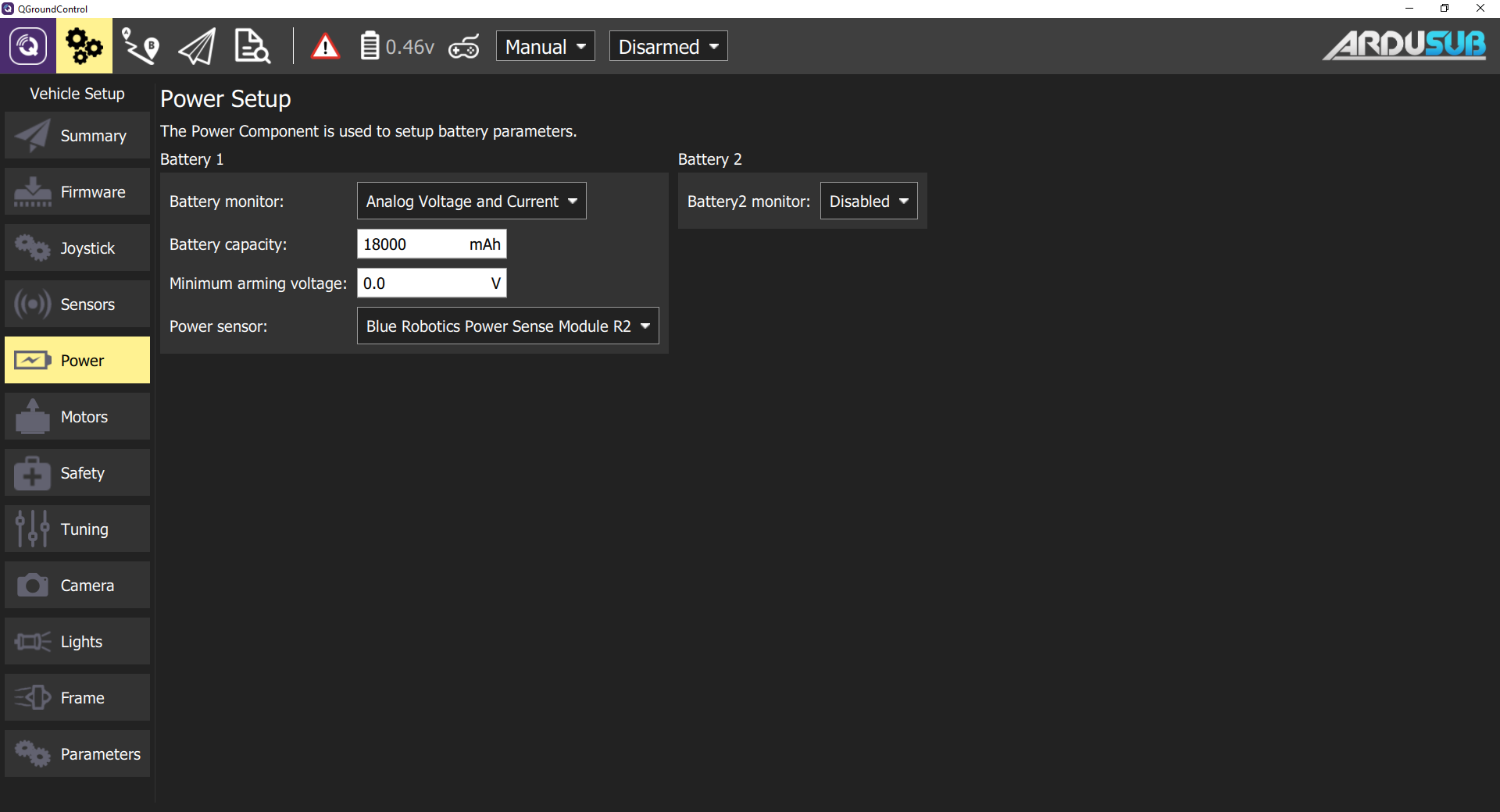
- In the Power tab of the QGroundControl Vehicle Setup page, select “Blue Robotics Power Sense Module” for the Power Sensor.



Reviews
There are no reviews yet.