






Product Description
The Newton Subsea Gripper is a single-function manipulator for the BlueROV2 and other subsea vehicles. It’s the result of several years of effort starting with a senior project in 2016 and evolving into the current design over several iterations. Each element was carefully designed and combined to create an awesome ROV tool.
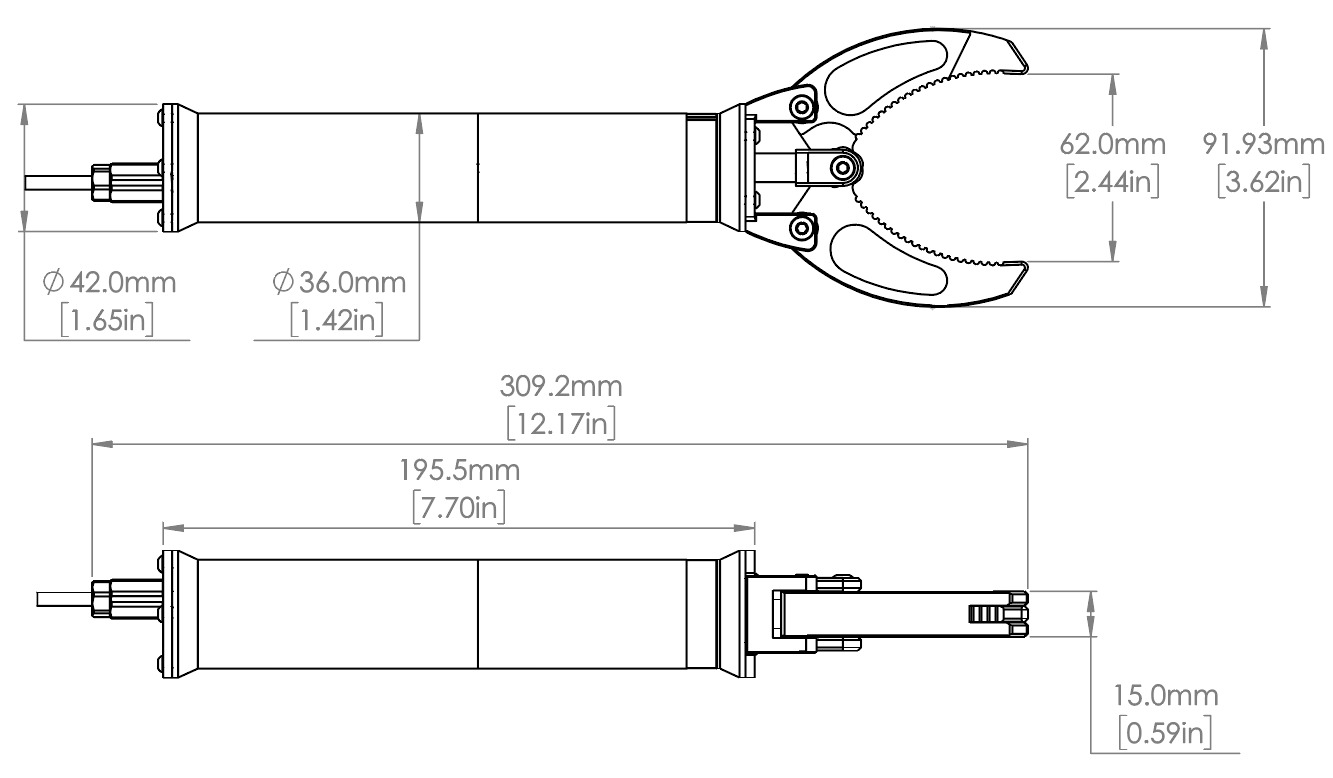
The gripper has jaws that open to grab objects up to 2.44″ or 6.2cm in diameter. The plastic jaws are mounted with custom aluminum screws to create a corrosion-resistant mechanism that doesn’t need any lubrication. The jaws are driven by a linear actuator that uses a geared brushed motor and lead screw. The main body is air-filled and sealed with O-rings. We’ve spent a lot of time testing it at pressure and it’s rated to 300m in depth with plenty of safety factors.

The motor inside is controlled by a purpose-built brushed motor controller that accepts a standard servo-style PWM signal so that the gripper can be controlled just like our thrusters and lights. Power can be provided by the same battery that drives the thrusters as the gripper is compatible with 9-18v input and draws up to 6A current. It automatically detects motor stall conditions and stops the motor so that the gripper will always stop at the right moment. Check out the launch video to see that in action!
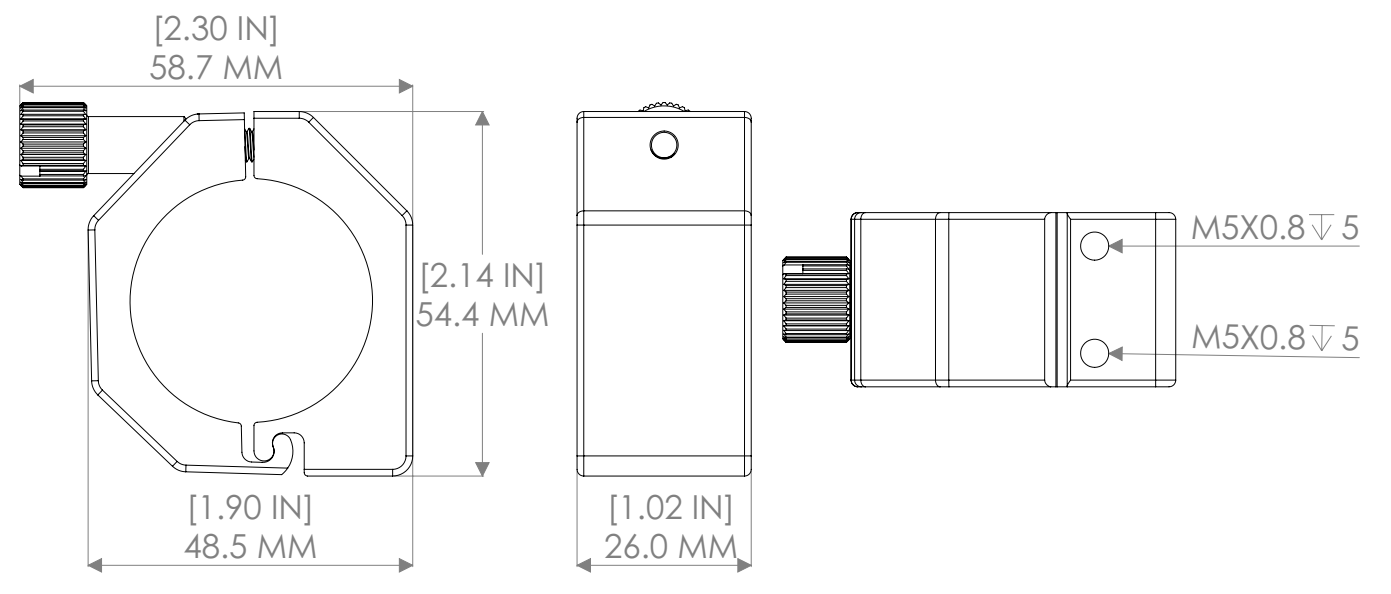
The gripper comes with everything needed to use it on the BlueROV2, including an anodized aluminum mount that uses a thumbscrew for quick retraction and rotation in the field. The mount attaches with two included M5 screws. You will have to drill mounting holes into the BlueROV2 bottom panel, but we’ve got clear instructions on how to do that in the documentation.
Contents
- 1 x Newton Gripper with Pre-installed WetLink Penetrator
- 1 x Penetrator Nut
- 1 x Penetrator O-ring
- 1 x Newton Gripper Mounting Clamps and Thumbscrew
- 2 x M5x16 button head cap screws
Specifications
| Parameter | Value | |
|---|---|---|
| Electric1al | ||
| Supply Voltage | 9 – 18 volts | |
| PWM Logic Voltage | 3.3 volts | |
| PWM Neutral Signal | 1500 µs | |
| PWM Open Signal | >1530 µs-1900 µs | |
| PWM Close Signal | <1470 µs-1100 µs | |
| Peak Current | 6 amps | |
| Mechanical | ||
| Grip Force (at tip) | 97N | 22lbf |
| Grip Force (in middle) | 124N | 28lbf |
| Push-rod Axial Load Rating | 3 kg | 6.6 lb |
| Minimum Linear Piston Travel | 13.5 mm | 0.53 in |
| Jaw Opening | 62 mm | 2.44 in |
| Time to Open/Close | 1.6 secs | |
| Cable | ||
| Cable Used | CAB-A-3-22AWG | |
| Cable Length | 635 mm | 25 in |
| Conductor Gauge | 22 AWG | |
| Wires | Black – Ground | |
| Red – Power | ||
| Yellow – Signal | ||
| Installed Penetrators | ||
| Device Side | WLP-M06-4.5MM-LC | |
| Cable End | WLP-M10-4.5MM-LC | |
| Internal Seals | ||
| Flange Cap | (2x) O-ring Buna-N-021 -70A | |
| Jaw Side | X-ring Buna-N-204 -70A | |
| Physical | ||
| Housing Material | Aluminum 6061-T6 | |
| Pressure Rating | 300 m | 984 ft |
| Overall Length (Closed) | 303.2 mm | 11.94 in |
| Overall Length (Open) | 309.2 mm | 12.17 in |
| Body Primary Diameter | 36 mm | 1.42 in |
| Bracket Mounting Hole Spacing | 16 mm | 0.63 in |
| Bracket Screw Size | M5x0.8 | |
| Weight in Air (w/ cable) | 524 g | 18.5 oz |
| Weight in Water (w/ cable) | 267 g | 9.4 oz |
| Functionality | ||
| Firmware Source | Newton Gripper | |
2D Drawings
Newton Gripper Assembly
Newton Gripper Mount
Newton Gripper Mount Drilling Template (.pdf)
3D Models
- NEWTON-GRIPPER-ASM-R3-PUBLIC (.zip)
- NEWTON-MOUNT-ASM-R1-PUBLIC (.zip)
Documents
Brushed ESC Schematic (.pdf)
Revision History
- 21 September 2021 | R3 – Initial release | Updated pre-installed penetrators to WetLink Penetrators
- 20 April 2021 | R2 – Initial release | Improvements to firmware and electronics for increased reliability
- 20 May 2018 | R1 – Initial release
Warnings
**Keep fingers and other body parts away from the gripper when operating!
** It’s strong and has the potential to do some damage. Notify other crew members to do the same.
If the gripper is continuously cycled rapidly for over a minute, the motor may overheat and melt the rotor frame. Please do not cycle open and close for over a minute and allow for a proper cool-down between quick cycles.
Quick Start
- 1. Connect the signal wire to a signal source such as the Pixhawk on the BlueROV2 or a 3.3v microcontroller. Arduino microcontrollers have a 5V DC PWM Output. This is listed as “operating voltage” on the specification table. If using the Newton Subsea Gripper with an Arduino, you will need a Logic Level Converter.
- Yellow: PWM (3.3 volts only)
- Connect the power wires to a power source.
- Red: +9-18 volts
- Black: Ground
- Provide a servo PWM pulse at 1500 μs for no movement. Provide a servo PWM pulse greater than 1530 μs to open the gripper. Provide a servo PWM pulse less than 1470 μs to close the gripper.




Reviews
There are no reviews yet.