





Product Description
The Ping360 scanning sonar is a mechanical scanning imaging sonar. It’s designed primarily to be used on the BlueROV2 and other ROVs for navigation in low-visibility water conditions, but it’s also suited for applications such as inspection, obstacle avoidance, target location, and tracking, autonomous systems development, and more!

What is a Scanning Sonar?
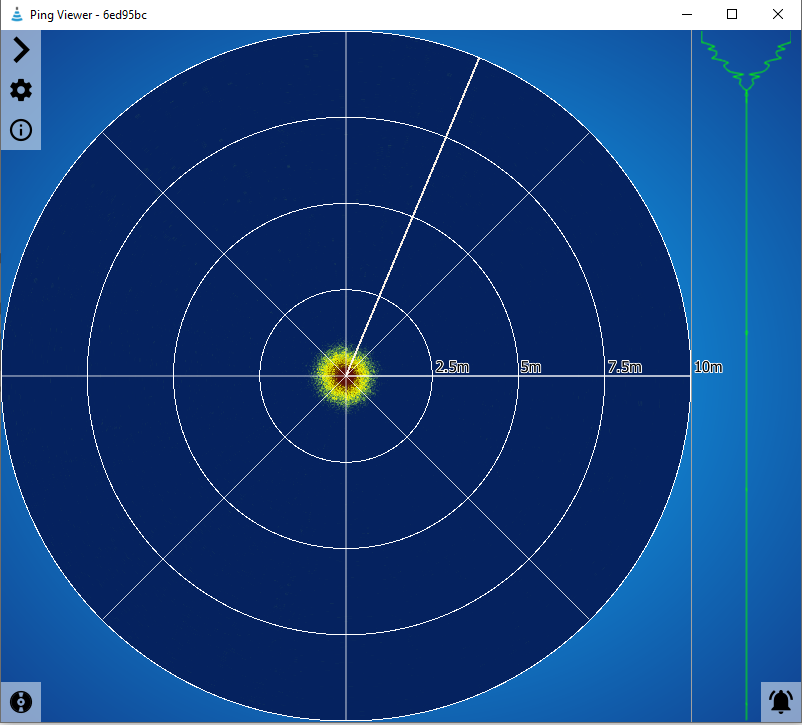
If you’re new to scanning sonars, here’s how it works: inside the Ping360 is an acoustic transducer that sends a narrow beam of acoustic energy into the water and then listens back for echoes. That transducer is mounted to a motor that rotates it in one-degree increments and as it does this it generates a circular image of the sonar’s surroundings with a maximum range of 50 meters (165 feet). The result is similar to what you might see from a weather radar on the local news or a laser scanner on an autonomous robot. Here’s an example of a scan of dock pilings straight ahead of the BlueROV2:
When mounted on an ROV, the scanning sonar gives you a top-down view of the ROV’s surroundings. You can see echoes from objects like ropes, walls, dock pilings, rocks, shipwrecks, boats, fish, and any other structures or objects that reflect sound waves. With that, you have reference points to navigate from, regardless of water visibility, and you can locate important features in the water quickly. Here’s an example of a 120-degree sector scan showing a rope in front of the sonar:
What’s Inside
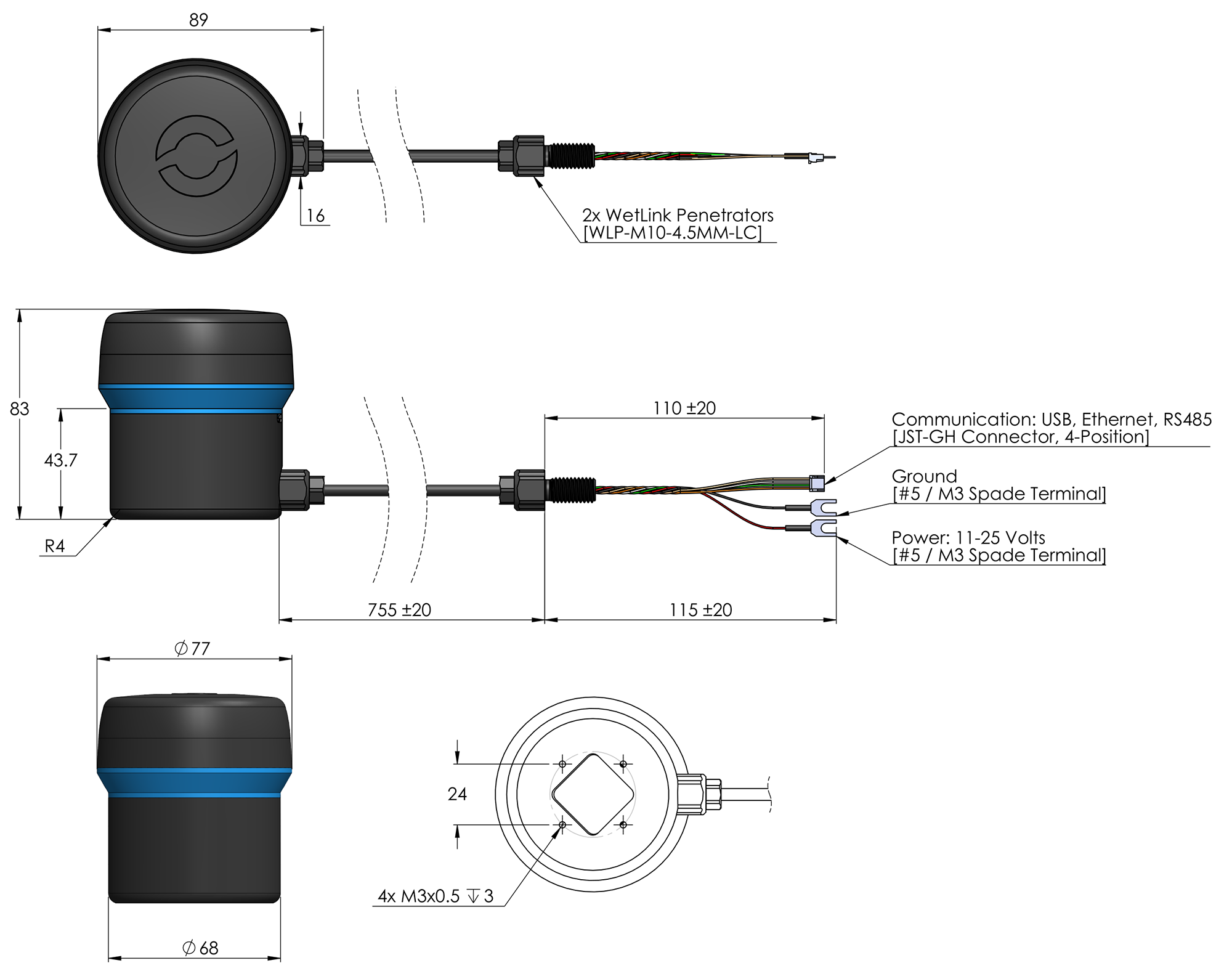
The Ping360 is designed with an oil-filled section at the top that houses the acoustic transducer and an air-filled section at the bottom. It has an anodized aluminum case and a 1-meter (3.3 foot) cable with a pre-installed WetLink penetrator. It’s rated to a maximum depth of 300 meters (984 feet). The bottom has four M3 mounting holes and interfaces with an included bracket that makes it easy to install on the BlueROV2 and in other applications.
The sonar operates at an acoustic frequency of 750 kHz and has a beamwidth of 2 degrees horizontally and 25 degrees vertically. Electrically, it can be powered from any clean 11-25 V power source and it communicates via USB, RS485, or Ethernet.



User Interface
The Ping360 connects to the open-source Ping-Viewer application for control and data display. Ping-Viewer runs on Windows, Mac, and Linux and can connect to the Ping360 through a direct connection to the computer or through the Companion web interface on the BlueROV2.
For those who wish to integrate the Ping360 scanning sonar into other systems and access the data directly, it communicates with a binary message format called the Ping-Protocol. We have C++, Arduino, and Python libraries for the Ping-Protocol to get you up and running almost immediately.
Check out the Technical Details and Learn tabs above for more information!
Contents
Sonar
- 1 x Ping360 scanning sonar with pre-installed cable and WetLink penetrator
- 1 x Penetrator Nut
- 1 x Penetrator O-ring
Mounting Hardware
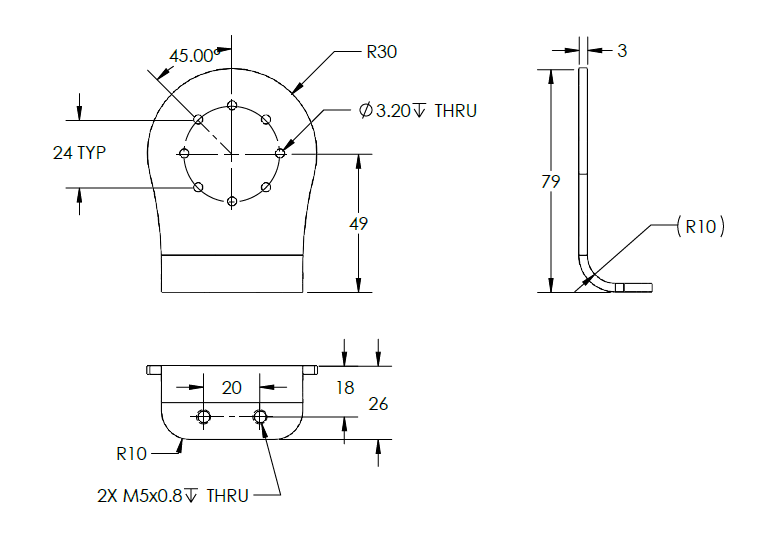
- 1 x Ping360 mounting bracket
- 4 x M3x5 button head cap screws
- 2 x M5x12 button head cap screws
Wiring
- 1 x 4-pin JST-GH to 4-pin JST-GH adapter PCB
- 1 x 4-pin JST-GH to USB-A adapter (for USB configuration)
- 1 x 4-pin JST-GH to male header pin adapter (for RS-485 configuration)
Specifications
| Parameter | Value | |
|---|---|---|
| Electrical | ||
| Maximum Supply Voltage | 25 volts | |
| Minimum Supply Voltage | 11 volts | |
| Maximum Power Consumption | 5 W | |
| Communication | ||
| Signal Protocols | USB, Ethernet (UDP), RS485 | |
| Message Protocol | Ping Protocol | |
| Message Subsets | common, ping360 | |
| Code Library Implementations | Python, C++, Arduino | |
| Cable | ||
| Cable Used | CAB-PUR-3UTP-28AWG-R2 | |
| Cable Length | 755 mm | |
| Conductor Gauge | 28 AWG | |
| Power Wires | Black | Ground |
| Red | Vin | |
| USB Configuration | Orange-White | V sense |
| Green-White | D- | |
| Green | D+ | |
| Orange | GND | |
| Ethernet Configuration | Orange-White | TX+ |
| Green-White | RX+ | |
| Green | RX- | |
| Orange | TX- | |
| RS485 Configuration | Orange-White | Not Used |
| Green-White | D- | |
| Green | D+ | |
| Orange | GND | |
| Installed Penetrators | ||
| Device Side | WLP-M10-4.5MM-LC | |
| Cable End | WLP-M10-4.5MM-LC | |
| Acoustics | ||
| Frequency | 750 kHz | |
| Beamwidth – Horizontal | 2° | |
| Beamwidth – Vertical | 25° | |
| Minimum Range | 0.75 m | 2.5 ft |
| Maximum Range | 50 m | 165 ft |
| Range Resolution | 0.08% of the range | |
| Range Resolution at 50m | 4.1 cm | 1.61 in |
| Range Resolution at 2m | 1.6 mm | 0.06 in |
| Mechanical Resolution | 0.9° | |
| Scanned Sector | Variable up to 360° | |
| Scan Speed at 2 m | 9 sec / 360° * | |
| Scan Speed at 50 m | 35 sec / 360° * | |
| Continuous 360-degree scan? | Yes | |
| Mounting Angle Offset? | Yes | |
| Physical | ||
| Pressure Rating | 300 m | 984 ft |
| Temperature Range | 0-30°C | 32-86°F |
| Weight in Air (w/ cable) | 510 g | 18 oz |
| Weight in Water (w/ cable) | 175 g | 6.17 oz |
| Sonar Mounting Screw Size | M3x0.5 x 5 mm | |
| Mounting Bracket Screw Size | M5x0.8 x 12 mm | |
* These values are projected to improve through software optimization.
2D Drawings
Ping360 Sonar
Ping360 Mount
3D Models
- PING360-SONAR-R2-PUBLIC (.zip)
- PING360-M-FRAME-MOUNT-R1-PUBLIC (.zip)
Revision History
- 15 February 2022 | R2 – Initial Release | Potted cable penetrators updated to WetLink Penetrators
- 17 September 2019 | R1 – Initial Release
Quick Start
- Download Ping-Viewer for your operating system.
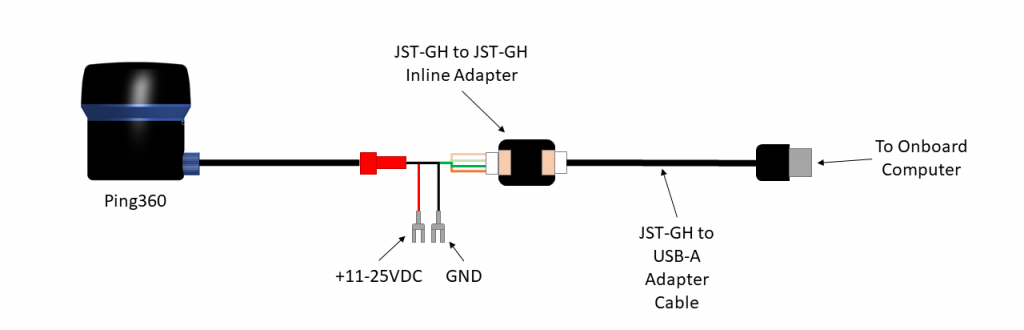
- Connect the power wires, red wire to 11-25VDC, and black wire to the ground.
-
Ensure the power wires are correctly installed (positive and negative) before the device is powered on. Ping360 does not have any reverse polarity protection and the Processor Board will be damaged if powered incorrectly.
- Plug the JST-GH to JST-GH inline connection board into the JST-GH connector coming from the Ping360.
- Plug the JST-GH to USB-A cable into the other end of the JST-GH to the JST-GH inline connection board.
- Plug the JST-GH to a USB cable (USB side) into a computer.
- Start Ping-Viewer, select the Ping360 from the Device Manager list and the sonar display and scanning should automatically start.
Guides
FAQ
Can the minimum range of 0.75m be further reduced?
The minimum range is a consequence of the “ringing” of the transducer. The transducer is acting like a bell, and it takes some time for the transducer to stop making noise after the pulse is over. Any possible returns in that time would get masked by this ringing. Reducing the minimum range would require redesigning the sonar.




Reviews
There are no reviews yet.